具身智能赛道融资密集爆发:梅卡曼德、若愚科技、仁新机器人斩获融资
融资主体:梅卡曼德
融资轮次:未明确具体轮次
投资机构:雄安基金,大洋电机,华创资本,中金保时捷基金,上河动量基金,南翔创投,海河基金,河北结构调整基金,天创资本
推理时间:2025-08-27
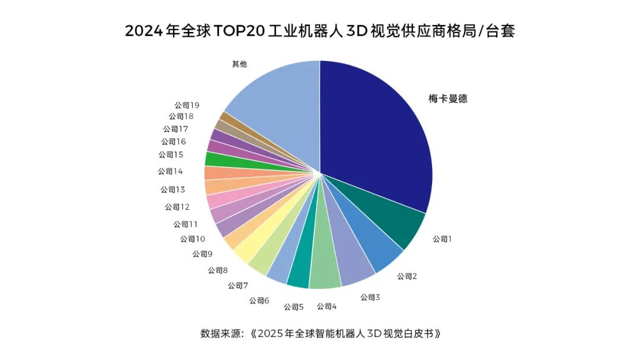
梅卡曼德完成新一轮近5亿元融资,加速具身智能“眼脑手”全栈技术进化与全球规模化落地
日前, 梅卡曼德完成近5亿元新一轮融资 。本轮融资由雄安基金、大洋电机、华创资本、中金保时捷基金、上河动量基金、南翔创投、海河基金、河北结构调整基金、天创资本等投资。 本轮资金将用于加速梅卡曼德具身智能“眼脑手”全栈技术的持续进化,拓展产品线与场景应用,并进一步提升全球商业化与客户服务能力 。大洋电机作为产业投资方,双方将探索在业务场景应用、前瞻业务研发等方面的深入合作。

梅卡曼德自主研发的具身智能“眼脑手”全栈技术,可与多种形态的机器人深度融合,使其具备多模态感知与自主规划能力,能够快速理解自然语言指令并执行多样化、复杂任务, 实现跨物体、跨任务、跨环境的高通用性操作 。这一技术体系是推动机器人进入千行百业的关键,也是解决机器人真正“干活”这一核心问题的基础,使机器人能够在真实生产与服务环境中稳定、高效地完成任务。
▎ 哈工大系具身智能黑马 若愚科技 斩获亿元级融资! 东方精工领投

▎ 工业焊接切割机器人研发商仁新机器人完成数千万元A轮融资,深创投独家投资


仁新机器人隶属 仁新企业集团 ,作为一家专注 工业具身智能 的企业。公司依托自研技术体系,已在 石化装备、轨道交通、核能核电、重型机械、钢结构及桥梁隧道 等多个行业开展应用,获得国内多个国央企客户的认可,并在 北美、欧洲等地布局且实现产品交付 。
通过多年打磨,公司产品系统的构建了 “ 手—眼—足—脑 ”协同体系 ,融合 3D视觉、AI算法、SLAM自主导航和RX焊接(切割)工艺库 ,能够实现焊割作业的全流程闭环控制。系统可适应不同材质和结构类型,支持复杂工况下的自动识别与路径规划,满足多场景、多任务的需求。

仁新机器人团队由 清华系、海外高校及行业专家 组成。团队自2005年起深耕机器人和人工智能相关研究,并积累了丰富的产业化经验。
本次融资后,仁新机器人将围绕三大方向全面提升公司实力: 一是技术研发 ,继续优化“手—眼—足—脑”协同体系,推动3D视觉和AI算法在核电、钢结构等高端场景的落地; 二是市场拓展 ,在国内重点产业集群和海外目标区域建立本地化的交付与服务网络; 三是人才建设 ,进一步引进算法、控制及工艺方向的专业人员,完善从产品研发到工程化交付的全链条能力。
文章来源: 仁新机器人
如需咨询商务合作、 宣传推广、 转载开白等事宜,请联系:18355423366 (微信同号)对接。
END


增值电信业务经营许可证:沪B2-20180461
Copyright©2025 acebridge 上海仕聚网络科技有限公司