投资组合动态|普超被投企业极佳视界完成2亿元A2轮融资,3个月连融5亿,打造物理AGI的原生模型和原生本体!
融资主体:极佳视界
融资轮次:A2轮
投资机构:达晨财智,华控基金,首发展创投,浦耀信晔,财鑫资本,珠海科技产业集团,张科垚坤,复琢创投,合鼎共资本
推理时间:2025-12-11
距上一轮融资发布仅一个月, 普超资本被投企业 极佳视界 近日再获新一轮投资!
本轮为 2 亿元 A2 轮融资 , 由达晨财智领投, 老股东 华 控 基金联合领投,首发展创投、浦耀信晔、财鑫资本、珠海科技产业集团 、张科垚坤、复琢创投等知名机构跟投,老股东合鼎共资本超额跟投 , 庚辛资本中国担任财务顾问。
此前,极佳视界已分别完成 Pre-A 、 Pre-A+ 、 A1 连续三轮融资, 3 个月内连续完成 4 轮 累计 5 亿元 A 轮系列融资。
作为一家专注物理世界通用智能的公司,极佳视界不仅面向物理 AGI 的目标推出原生模型,也已于 2025 年 11 月 26 日发布相应本体,布局物理 AGI 的终端业务
具体而言,公司产品包括世界模型平台 GigaWorld (驾驶和具身)、通用具身大脑 GigaBrain 、通用具身本体 Maker 等物理 AI 全栈软硬件产品。 产品矩阵从软硬件两端,系统化 布局 了物理 AI 的未来发展路径。
模型方面,极佳视界提出了“ 世界模型 + 行动模型 + 强化学习 ” 的原生范式,这其中每一环节均以世界模型为驱动。
当前,模型架构正向 通用行动模型(如 VLA 与世界行动模型)收敛 ; 数据来源 转向以真机数据与世界模型生成数据为核心 ; 学习方式则形成 「模仿学 习 + 强化学习 + 世界模型」 的通用范式。 可以说,世界模型正成为物理 AGI 在数据来源、学习方式与模型架构层面的核心驱动力 。
鉴于原生模型的重要性,以 “ 操作与上肢 ” 为中心、 能更好与物理世界交互、数据 优 先的 原生本体日益成为关键需求。 “ 传感器 - 执行器 - 数采设备 - 通用模型 ” 之间可规模化的闭环迭代,也愈发凸显其价值。
极佳视界认为,物理 AI 正在进入全新的关键时代,未来 2-3 年是物理 AGI 突破的关键窗口期。在世界模型和行动模型的不断突破下,物理世界的 “ChatGPT 时刻 ” 正在加速到来 !
原生模型和原生本体的深度结合,是抵达上述目标的关键。
深 耕物理 AGI 的世界冠军团队
回顾过去成绩,极佳视界发布并开源了全球首个世界模型驱动的具身 VLA 大模型 GigaBrain-0 、行业领先的具身世界模型 GigaWorld-0 。
此前文章《 获得华为哈勃和华控基金联合领投亿元级A1轮战略融资,极佳视界用“世界模型”引领物理AI走向终局技术路线 》 中数据显示,公司模型性能已达到行业先进水平。
此外,公司还于近日正式发布自研的全新一代物理 AGI 原生本体 Maker H01 , 并已经开启规模化量产交付 。
极佳视界紧密依托清华大学自动化系智能视觉实验室,核心团队完整经历了过去十年物理 AI 的发展历程,并在技术创新和产业落地上都持续做出世界级成果。
在 CV 时代,团队多次主导获得 FRVT 、 COCO 、 VOT 等全球最具影响力视觉 AI 比赛的世界冠军,并实现大规模产业落地。
在自动驾驶时代,团队提出的 BEVDet 等系列工作是全球最有影响力的自动驾驶 BEV 范式之一,长期排名 nuScenes 全球第一,并实现规模化量产落地;团队还主导了 地平线 AIDI 平台 等行业最大规模的数据闭环产品研发和商业落地,以及 百 度 Apollo 仿真框架 的研发和商业化落地。
在世界模型和具身智能时代,极佳视界的 DriveDreamer 系列是 全球最早的面向物理世界的世界模型代表性工作 , 并实现规模化量产落地; GigaBrain-0 是世界模型驱动的处于 国内领先水平的自研具身 VLA 大模型 ; GigaWorld-0 是 全球首次 系统介绍,并在真机上大规模验证价值 的具身世界模型,并在实际场景中大规模使用。
极佳视界创始人兼 CEO 黄冠博士,是清华大学自动化系创新领军工程博士,曾担任地平线机器人视觉感知技术负责人、鉴智机器人合伙人 & 算法副总裁,并拥有三星中国研究院、微软亚洲研究院等顶尖研究机构工作经历。
黄冠博士完整经历过去十年物理 AI 的技术和产业发展历程,并带领团队不断做出突破性全球领先成果,在物理 AI 方向兼具行业领先的技术创新、产业落地和连续创业经验。
物理 AGI 原生模型
极佳视界提出的 “ 物理 AGI“ ,指向能够胜任与物理世界交互的通用人工智能。目前,公司已发布物理 AGI 原生行动模型 GigaBrain-0 ,以及物理 AGI 原生世界模型 GigaWorld-0 。
GigaBrain-0 是具身机器人的大脑,提供了 端到端的决策控制 。 通过使用当前最先进的 VLA 模型架构, GigaBrain-0 支持图像、深度、文本、本体状态的输入,输出结构化的任务规划和运动规划,并在大规模的数据上完成预训练。
针对当前机器人操作中的精准度不足和推理能力不足的问题, GigaBrain-0 还重点提升了 3D 空间感知能力 和 结构化的推理能力 , 能够完成更精准的移动导航和更长序列的复杂操作,并且具备更强泛化性。
不仅如此, GigaBrain-0 还可以完成多项长程复杂任务,包括灵巧操作任务(如做咖啡、叠纸箱、叠衣服、整理卷纸)、长程任务(如收拾桌面、倒饮料)和移动操作任务(如搬运箱子、拾取衣物)。 GigaBrain-0 的成功率显著优于现有 SOTA 方法。
GigaWorld-0 是具身机器人的养料,提供了 高质量、大规模训练数据 。
极佳视界自研 ” 世界模型平台 GigaWorld” ,通过 几何一致 、 物理准确 的世界模型 建模,生成 高保真、可控、多样化 的具身交互数据,实现 “ 数据放大 ” ,构建了 最完整的具身数据体系 , 使得所训练的 VLA 模型在新纹理(训练中未见的材质纹理)、新视角(训练中未见的观测角度)、新物体位置(训练中未见的空间布局)三大泛化维度上均实现近 300% 的 性 能提升 。
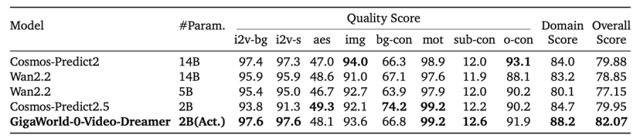
△ 极佳视界模型表现
物理 AGI 原生本体: Maker H01
面向物理 AGI ,只有原 生行动模型与原生世界模型仍不足够,极佳视界还推出了原生本体 ——Maker H01 。

△ 极佳视界 Maker H01 机 器 人
Maker H01 搭配 GigaBrain 和 GigaWorld 的一系列工具链,可以 快速在家庭、商业服务、轻工业等开放场景中以更低成本、更高成功率完成落地和任务泛化。
这款高自由度具身智能机器人采用双臂 + 移动底盘形态,可在家庭、工业、服务、科研等多种场景中执行取放物品、巡检、接待、协助实验等任务。
其底盘为全向全驱,具备较高机动性与续航能力,单臂具备公斤级负载与多指手爪配置,整体更偏向 “ 工程可用 ” 的具身平台,可在真实业务环境中承担持续作业和算法验证双重角色。
该机器人提供约 1.6m 的成人身高版本,适合不同空间与应用需求;全身拥有二十余个自由度,配合多种传感器,能够完成精细的操作和柔顺运动控制。
同时, Maker H01 支持多种遥操方案,结合自研的具身大脑“GigaBrain” ,使其在抓取、搬运、协作等复 杂动作中实现全身协同。
随着原生模型和原生本体的不断进化,极佳视界已经和多个行业头部客户达成签约和量产合作,包括全球多个头部主机厂、多地人形机器人创新中心和实训场、多个具身方向头部工业/服务/家庭场景公司等客户。
未来,极佳视界将持续迭代「世界模型+行动模型+强化学习」的物理AGI原生模型,加速研发适配具身大脑的物理AGI原生本体,同时推进标杆场景落地和通用场景布局。通过 「原生模型-原生本体-通用场景」 三位一体,加速走向 物理AGI

增值电信业务经营许可证:沪B2-20180461
Copyright©2025 acebridge 上海仕聚网络科技有限公司